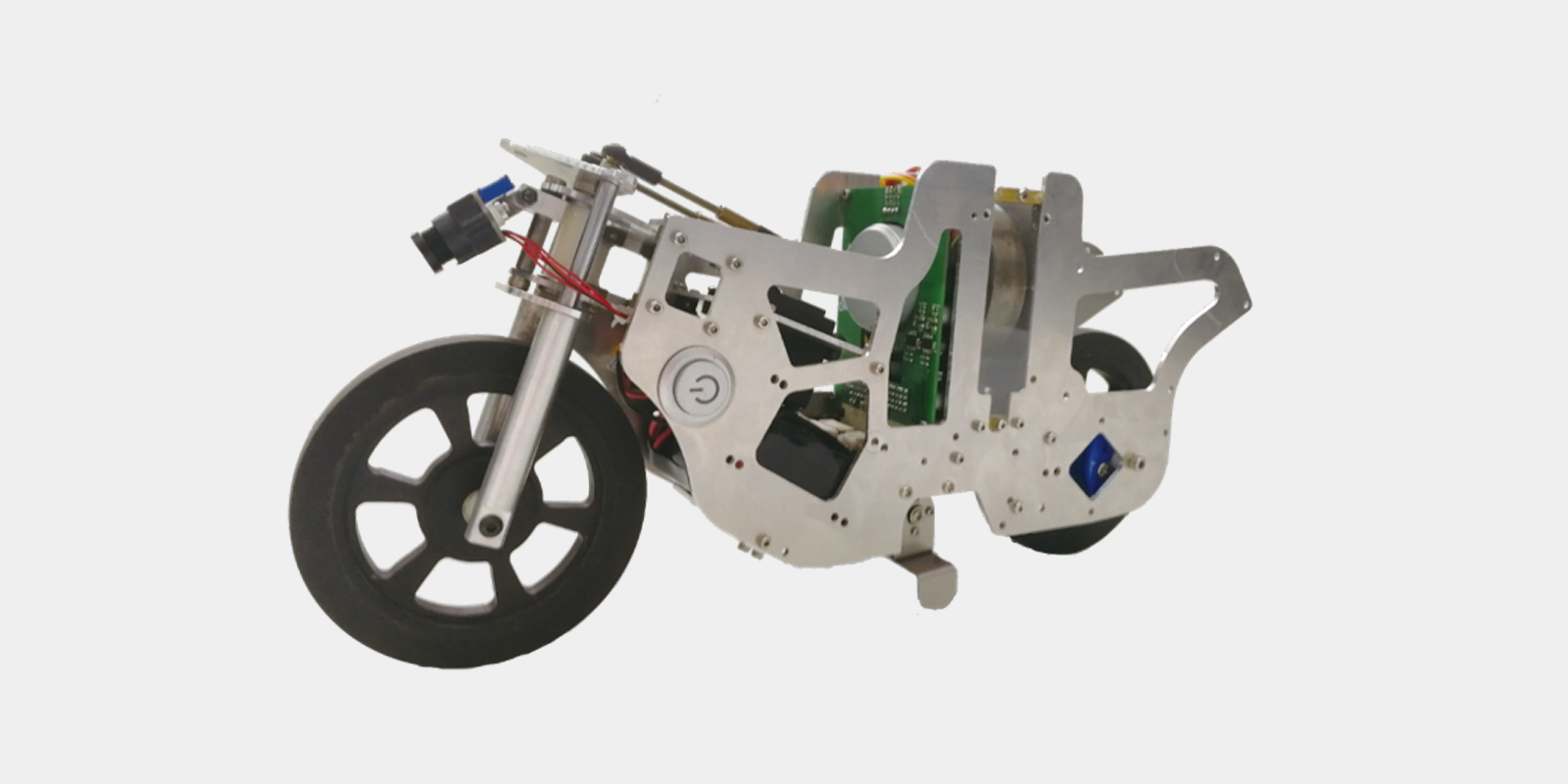
“自平衡摩托车”结合前沿自平衡控制技术,通过对摩托车的控制,能够让学生在实践过程中对自动控制原理、动量守恒定律、
反馈控制等有直观的理解,帮助学生迅速掌握自平衡系统控制技术。课程配备自平衡摩托车、倒立摆实训平台以及完善的课程资料,包括课程指南、
学习指导书、实训手册、教学课件、实践代码以及考核资料包,便于授课学习。
课程采用软硬件一体化教学,涉及硬件、软件平台、C语言编程、算法调试、实际场地运行等多方面。课程定位于各中高职、专本科院校的自动化、机器人、计算机、电子类、人工智能等相关专业的专业基础课与综合实践课,已修完先修课程的学生均可学习本课程。亦可作为自平衡摩托车爱好者的课外读物与实践参考手册。
| 章 | 节 |
|---|
| 第一章 绪论 | 1.1 机器人发展概述 |
| 1.2 自平衡摩托车简介 |
| 1.3 实训:开发环境安装与配置 |
| 第二章 摩托车机械架构设计 | 2.1 行走结构及其特点 |
| 2.2 纵向与横向控制结构 |
| 2.3 自平衡摩托车电路结构 |
| 第三章 驱动与运动控制原理 | 3.1 电机学基础 |
| 3.2 三相直流无刷电机工作原理 |
| 3.3 舵机驱动原理 |
| 3.4 三相直流电机调速策略 |
| 3.5 实训:摩托车速度控制实践 |
| 第四章 环境感知技术及应用 | 4.1 认识传感器 |
| 4.2 常用传感器基本原理 |
| 4.3 机器视觉与图像识别技术应用 |
| 4.4 目标检测相关技术应用 |
| 4.5 实训:巡航实践与调试 |
| 4.6 实训:手势检测实践 |
| 第五章 姿态平衡控制 | 5.1 动量轮与角动量守恒 |
| 5.2 反作用轮倒立摆系统 |
| 5.3 基于四元数的姿态解算 |
| 5.4 基于滤波的姿态解算 |
| 5.5 实训:直立行走控制实践 |
| 第六章 通信与交互 | 6.1 现代通信方式 |
| 6.2 通信协议与摩托车通信机制 |
| 6.3 人机交互模块设计 |
| 第七章 定位导航与路径规划 | 7.1 导航与定位技术概述 |
| 7.2 机器人路径规划 |
| 7.3 实训:路径规划实践 |
| 第八章 自平衡功能实现 | 8.1 实训:自平衡摩托车竞技实战 |
| 名称 |
参数 |
| 核心 |
STM32F103RCT6 |
| 尺寸 |
39.5cm*8.5cm*17.5cm |
| 飞轮电机 |
直流无刷电机 |
| 行走电机 |
直流有刷电机 |
| 舵机 |
转向舵机 |
| 轮胎直径 |
φ110mm |
| 最小转弯半径 |
55cm |
| 车身材料 |
航空铝合金 |
| 轮胎材料 |
橡胶 |
| 电池 |
24V/2200mA/18650 |
| 最大行驶速度 |
0.4m/s |
| 额定工作时长 |
2.5h |
| 工作温度 |
0~45℃ |
| WIFI通信距离 |
>25m |
| 组网通信延迟 |
<120ms |
| 传感器 |
惯性IMU模组 |
| 摄像头 |
128线性感光CCD |
| 内容清单 |
每套数量 |
内容清单 |
每套数量 |
| 自平衡摩托车实验箱 |
1 |
配套工具 |
1 |
| 核心模块 |
1 |
合格证 |
1 |
| 充电器 |
1 |
保修卡 |
1 |
| 下载器 |
1 |
教师课程资料包 |
1 |
| 实验箱资料U盘 |
1 |
|
|

